Introduction
The dynamic interplay between humans and machines is reshaping numerous fields, with interactive human-robot music standing out as a compelling frontier in this evolution. The development of robotic musicians represents an intriguing blend of art and science, with applications spanning therapeutic interventions to pure entertainment.
Music, a fundamental aspect of human culture, transcends language and geographical boundaries, making it an ideal medium for exploring human-robot collaboration. Introducing robots into musical performances allows us to bridge the divide between humans and machines, fostering new forms of expression and interaction.
In contrast, advanced robotic ensembles aim for a higher level of interaction by 'listening' to each other and adapting in real-timeProcessing or responding to data immediately as it is received, without delay to the sounds they produce collectively. This dynamic interaction creates a shared acoustic experience, where robots and human musicians synchronize and adjust based on each other's musical cues.
The Challenge of Synchronization
However, effective synchronizationThe coordination of simultaneous processes or events to operate in unison within human-robot musical ensembles presents a significant challenge. Human musicians naturally adapt to each other using subtle cues and variations in rhythm, tempo, and dynamics—elements that are not easily replicated by machines.
The tempoThe speed or pace of music, usually measured in beats per minute (BPM) in human performances is rarely fixed; it ebbs and flows according to the emotional and expressive content of the music. Such behaviour can be modelled using dynamical systems, represented as oscillatorsA system that produces regular, repetitive variations, used in synchronization models to represent rhythmic elements that synchronize with external signals or among themselves.
Research Questions
To conduct a systematic literature review, we developed specific research questions focusing on the paradigm of human-machine synchronization in the musical domain. These questions guide our exploration of the literature and help identify gaps in existing research.
🧠 Research Question 1
What are the underlying factors behind human musical synchronization with other humans?
This explores the neurobiological, psychological, and behavioural mechanisms that enable human-to-human musical coordination.
🤖 Research Question 2
How are current robots synchronizing with human performances?
This examines the technological approaches and computational frameworks used by existing robotic musical systems.
🎵 Research Question 3
How does synchronization work in a musical ensemble?
This investigates the dynamics of group synchronization, leadership roles, and ensemble coordination mechanisms.
📊 Research Question 4
What are the different mathematical models for synchronization, and what is special about Kuramoto'sThe Kuramoto model describes synchronization in systems of coupled oscillators, widely used in modeling biological and musical synchronization model?
This examines mathematical frameworks for modeling synchronization phenomena in complex systems.
Methodology
Systematic Literature Review Approach
The literature review in this chapter is based on the Kitchenham method, a well-regarded approach in software engineering and interdisciplinary studies for conducting systematic literature reviews. This method was selected due to its comprehensive and well-documented review processes.
Key Steps in the Kitchenham Method:
- Identifying the need for a systematic literature review and defining research questions
- Conducting a comprehensive search for relevant studies
- Assessing the quality of the selected research studies
- Extracting relevant data from the selected research studies
- Compiling background information on the selected research studies
- Summarizing and synthesizing the results of the research studies
Search Strategy
The primary research terms used in this study are: Music Ensemble, Synchronization, and Robot.
Resources Searched
A comprehensive search was conducted across five journal repositories from January to May 2019:
- Google Scholar - Search engine for scholarly and academic works
- ScienceDirect - Database for scientific and medical journals
- IEEE Xplore - Digital library of IEEE publications
- ACM Digital Library - Over 430,000 full-text research papers in computing
Document Selection Process
Inclusion Criteria
A research article was included if it directly addressed one or more research questions related to human-robot synchronization, both in general and in the musical domain.
Exclusion Criteria
- Research articles that fell into categories of books or grey literature
- Research articles focused on secondary or primary school learning
Quality Assessment
Each primary research article was assessed based on five key quality criteria:
Credibility
Are the findings of the research credible?
Objectives
Does the evaluation adequately address the research aims?
Data Collection
Was data collected appropriately and suitably?
Conclusions
Are conclusions clearly derived and presented?
Documentation
Is the research process adequately documented?
Scoring system: No (N) = 0.0, Partly (P) = 0.5, Yes (Y) = 1.0. A study achieving a total score greater than three was accepted.
| Study Focus | Human-Robot Sync | Musical Performance | Count |
|---|---|---|---|
| General Human-Robot Synchronization | ✓ | - | 6 |
| Musical Human-Robot Synchronization | - | ✓ | 11 |
| Both | ✓ | ✓ | 2 |
Results
Out of the 47 sources initially identified, we included 15 peer-reviewed research papers. These studies provide evidence based on experimental data and have been published in scientific journals or conference proceedings.
Research Question 1: Underlying Factors Behind Human Musical Synchronization
This research question was guided by four key studies exploring the neurobiological, psychological, and behavioural dynamics of human synchronization in musical contexts.
Key Findings:
🧠 Neural and Physiological Basis
- Brain-to-Brain Synchrony: EEGElectroencephalography - a method to record electrical activity of the brain coherence in alpha and theta bands
- Embodied Listening: Body movements highly synchronized with music
- Social Enhancement: Synchronicity enhanced during group interactions
🎯 Memory and Predictive Coding
- Long-Term Memory Effects: Professional musicians show long-range temporal correlations
- Anticipation Strategies: Complex adaptive strategies for beat prediction
- Cross-Species Evidence: Beat synchronization observed in vocal learning animals
Research Question 2: How Robots Synchronize with Human Performances
This research question was informed by three key studies exploring different technological approaches:
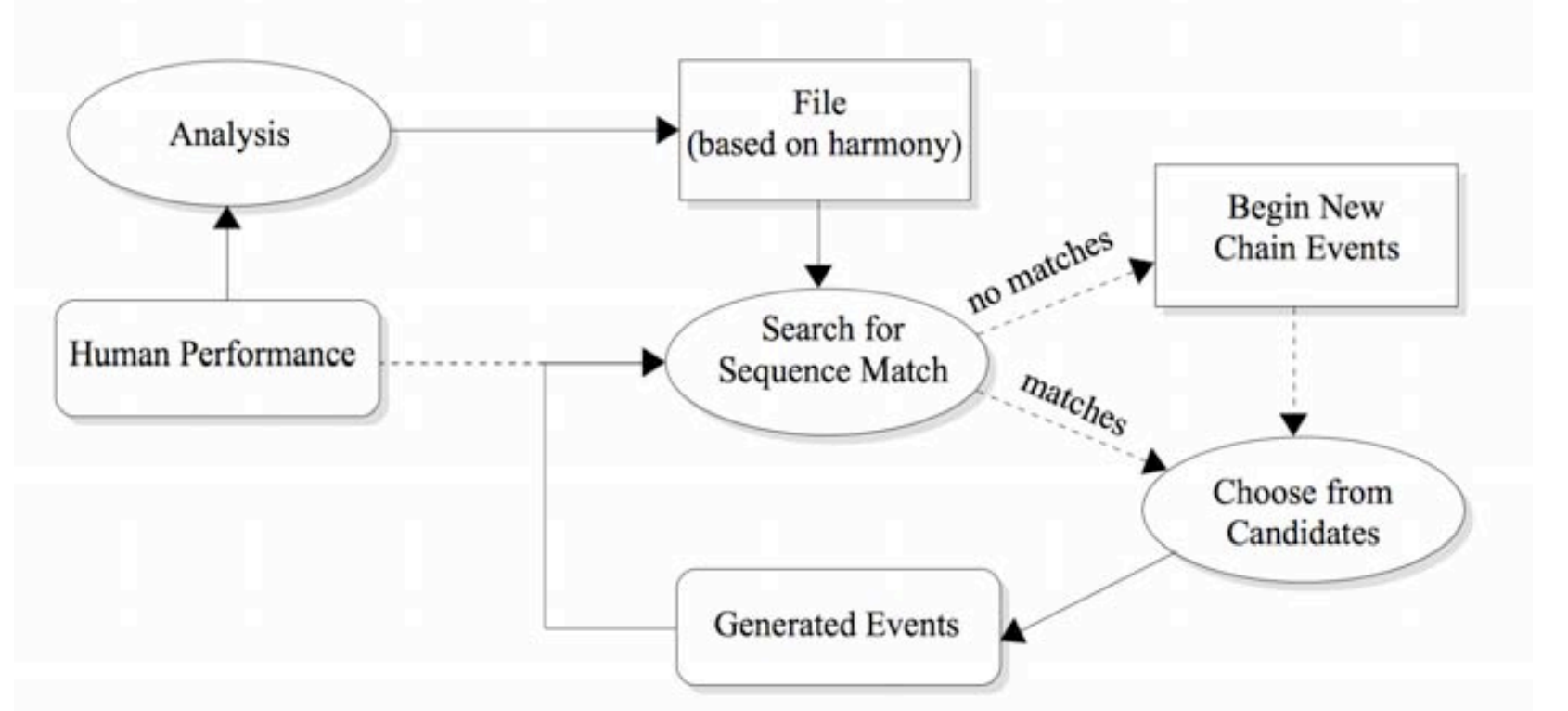
🎹 Shimon (Hoffman & Weinberg)
Approach: Gesture-based framework with anticipatory model
Technology: MIDIMusical Instrument Digital Interface - a technical standard that describes a communications protocol for electronic musical instruments-based note detection, physics-based motion control
Limitation: Struggles with rapid tempo changes and complex improvisations
🎶 ESitar & MahaDeviBot (Kapur et al.)
Approach: Multi-modal sensors with hyperinstrument
Technology: Force-sensing resistors, accelerometers, MIRMusic Information Retrieval - computational methods for analyzing and understanding music algorithms
Limitation: Synchronization lag of 150-200ms during tempo shifts
🎵 Robot Thereminist (Otsuka)
Approach: ICAIndependent Component Analysis - a statistical technique for separating mixed signals-based noise suppression
Technology: Real-time beat-tracking, precision arm control
Limitation: Signal separation quality degrades in noisy environments
Common Challenges Identified:
- Adaptability Issues: Difficulty with rapid tempo changes and complex improvisations
- Latency Problems: Synchronization lags of 200-300ms during dynamic changes
- Environmental Robustness: Performance degradation in noisy or polyphonic environments
- Limited Expressiveness: Insufficient capture of human musical nuances
Research Question 3: Synchronization in Musical Ensembles
This question was explored through three studies examining different dimensions of ensemble synchronization:
Key Findings:
🎭 Social Dynamics (Volpe et al.)
Small ensembles require collaborative synchronization rather than hierarchical control. Synchrony emerges from continuous, bidirectional adjustments by all members.
🎹 Auditory Feedback (Goebl & Palmer)
Piano duet studies revealed that reduced auditory feedback increases temporal asynchronies. Visual cues become more critical when auditory information is limited.
🧠 Cognitive Processes (Keller)
Three key cognitive processes enable ensemble synchronization:
- Anticipatory Auditory Imagery: Mental simulation of sounds
- Prioritized Integrative Attention: Dividing attention between self and others
- Adaptive Timing: Real-time movement modification
Research Question 4: Mathematical Models for Synchronization
The Kuramoto modelThe Kuramoto model describes synchronization in systems of coupled oscillators, widely used in modeling biological and musical synchronization emerges as a particularly powerful framework for modeling synchronization in complex systems.
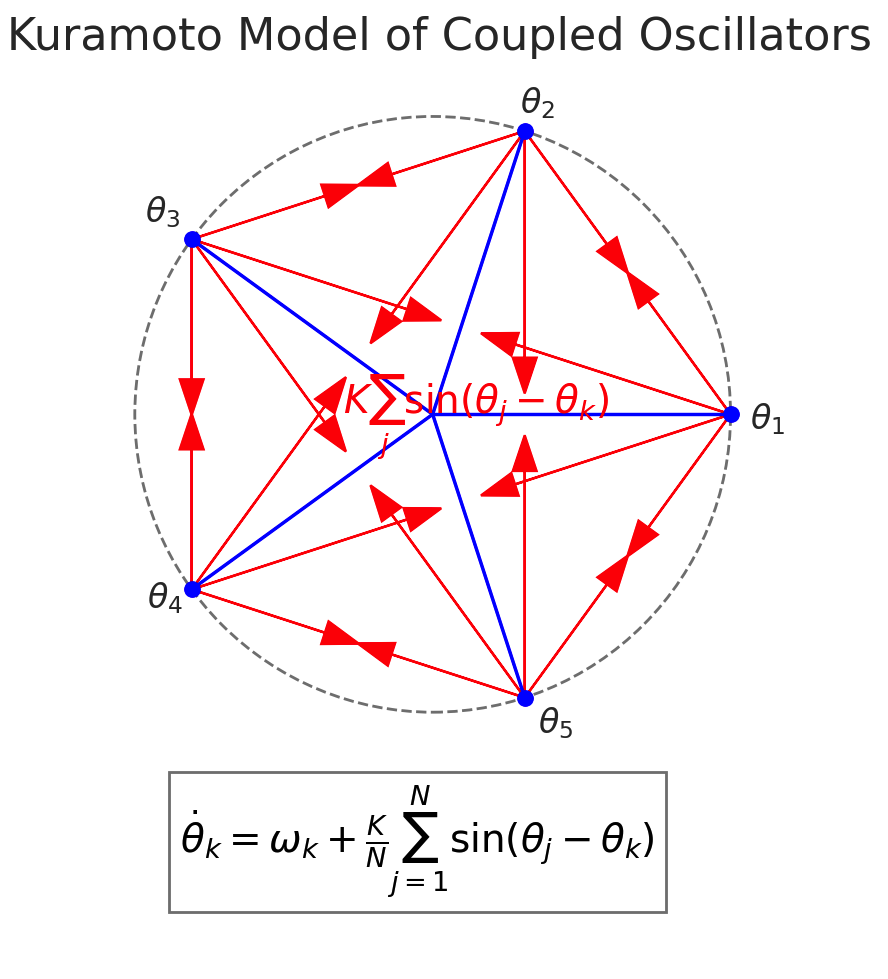
Why Kuramoto Model is Special:
🔄 Phase Coupling
Models how oscillators influence each other's timing through phase differences
⚖️ Emergence
Demonstrates how global synchronization emerges from local interactions
🎵 Musical Relevance
Directly applicable to modeling musicians as coupled oscillators
📊 Mathematical Tractability
Provides analytical solutions for certain parameter ranges
Research Gaps Identified
🚫 Key Limitations in Current Research:
- Limited Multimodal Integration: Most systems rely on single sensory modalities
- Insufficient Real-Time Adaptation: Poor handling of dynamic tempo changes
- Lack of Expressive Modeling: Limited capture of human musical nuances
- Scalability Issues: Most studies limited to small ensembles or specific instruments
- Environmental Constraints: Performance degradation in complex acoustic environments
Future Research Directions
Based on the literature analysis, several key areas emerge for future investigation:
- Advanced MultimodalUsing multiple modes or methods of input/output, such as combining audio, visual, and gestural data Integration: Combining audio, visual, and gestural cues
- Predictive Modeling: Using machine learningA type of artificial intelligence that enables computers to learn and improve from experience without being explicitly programmed for anticipatory synchronization
- Adaptive Control Systems: Real-time adaptation to changing musical contexts
- Expressive Modeling: Capturing and reproducing human musical expression
- Scalable Architectures: Systems that work across different ensemble sizes and genres